一、作品簡介
本專題主要是製作能夠搜尋迷宮的微型電腦鼠,此微型電腦鼠的長及寬分別為正常規格電腦鼠的一半。2009年全日本電腦鼠比賽引入微型電腦鼠競賽項目,迷宮擴大為32×32,但每一個方格的邊長都縮短為原來的一半,而且中點不再固定在迷宮中心。半尺寸電腦鼠競賽的難度不論在軟及硬體製作上都比原來的電腦鼠競賽困難許多。
本微型電腦鼠經由馬達回授系統,判斷電腦鼠目前在迷宮中的那個座標,且利用紅外線感測器將行走過的環境狀態儲存起來,再配合具有人工智慧的演算法,將電腦鼠牽引至迷宮的中心位子,達到迷宮搜尋之目的;之後電腦鼠會算出最短路徑,並且再次搜尋迷宮中的可能最短路徑,直到回到起點;回到起點後會以最快速的速度,行走演算出的最短路徑,到達終點,達到此專題製作之要點。
二、設計原理
製作本專題必須要了解馬達、感測器、MCU、伺服馬達的控制、迷宮搜尋演算法。
首先馬達的選擇必須要很清楚的知道所需之力量,接著才能進行下一步的感測器的選擇,馬達的部分在第四章原理已經有稍加說明,在此不在說明;感測器的選擇則使用體積較小的紅外線感測器來設計,然而波段的選擇,則本專題使用室內光源中較少之產品所用的波段為940nm,以免電腦鼠在製作時被環境光影響,造成不正常之因素。MCU的選擇最主要還是功能性越多越好,設計電腦鼠之前必須要清楚的知道需要什麼功能,因此就盡量減少開發上的硬體成本,MCU微處理器的功能越多越好。伺服馬達的控制,在這部分要先了解伺服馬達的驅動,本專題使用Allegro所生產的A3950,此顆為整合型驅動器,內含MOS緩衝器及H-BRIDGE,使用整合型驅動器可以減少硬體製作上的成本,也能夠讓電腦鼠縮的更小;接著再配合馬達的編碼回授信號,轉為計數的數位資料後,則配合PID的控制理論,改變PWM訊號控制馬達之轉動速度。
迷宮搜尋演算法,目前有很多種方式,有中左、中右、向心、洪水法、A*法…等,在迷宮搜尋這方面可參考之資料不多,之前較大型的電腦鼠,則使用了向心之法則,發覺並不會比較聰明,因此在本次之專題,在演算法的這一方面,特別下了很多功夫,使用了改良式洪水法,整合出讓旁觀的人們看此電腦鼠搜尋,都會覺得很聰明。
三、系統架構
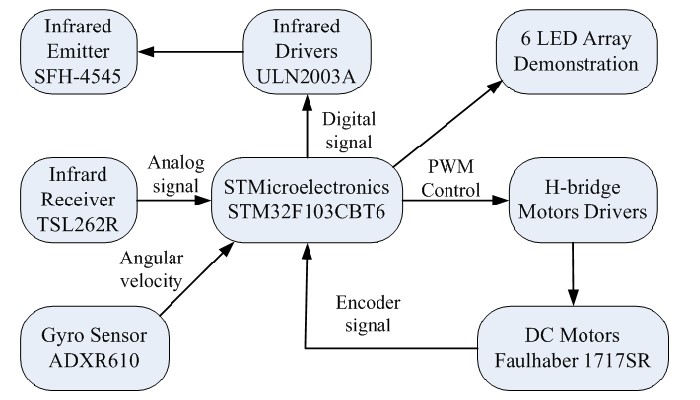
硬體架構圖
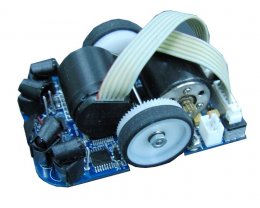
成品圖
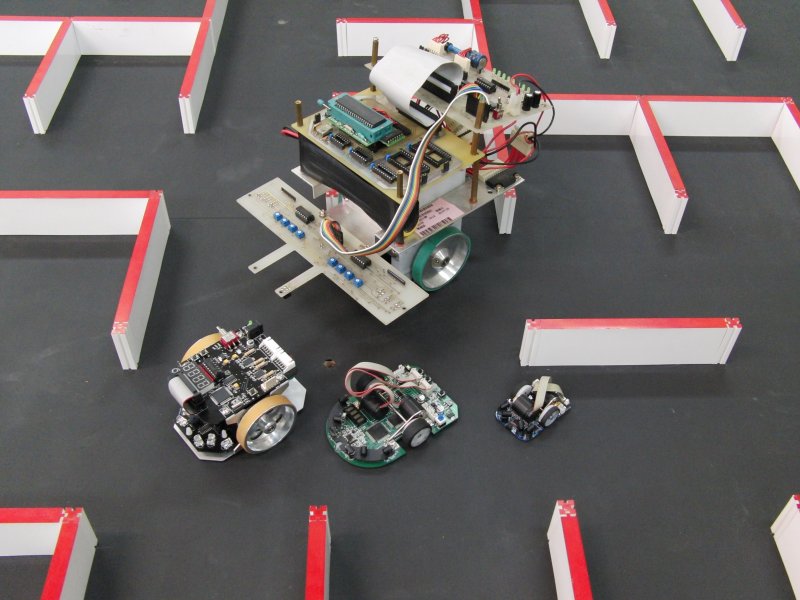
大小電腦鼠集體照