社群資訊
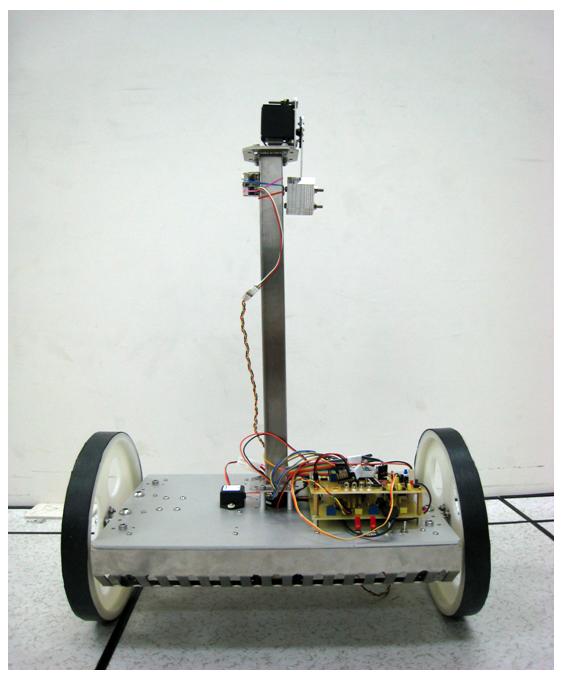
兩輪平衡機器人之控制
by 吳一德, 2011-01-27 17:08, 人氣(3510)
作品簡介:
本系統主要是設計
系統功能:
l
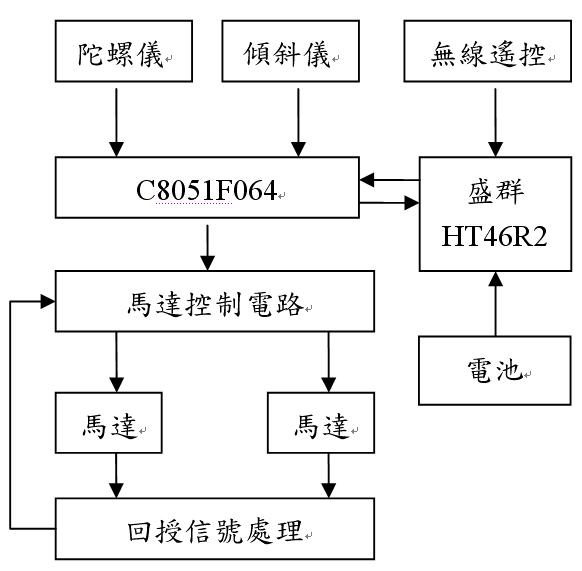
系統可分為電源系統、伺服回授系統、主控系統、馬達驅動。
l
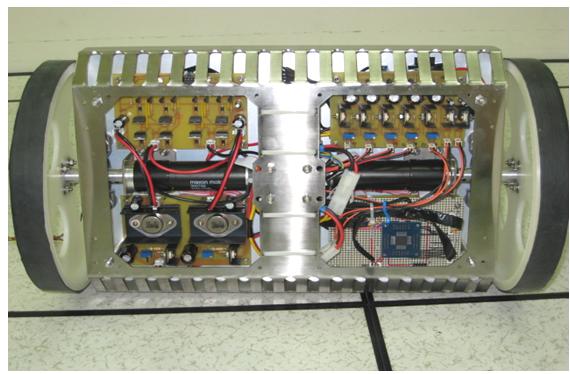
電源系統:分為大功率電力與小功率電力分別提供給馬達和IC。
l
主控系統:分為車身自我平衡控制以及無線遙控行動控制。
系統架構:
硬體架構
l
馬達驅動:經由主控系統決定馬達應做的反應。
l
伺服回授:藉由DC伺服器回授得知目前速度和位置在進行解碼。